จุฬาฯ เปิดตัว “วีลแชร์เดินได้” Wheelchair Exoskeleton หุ่นยนต์สวมใส่บนร่างกายมนุษย์ นั่ง ลุกยืน และเดินได้ในตัวเดียว
รศ.ดร.รณพีร์ ชัยเชาวรัตน์ คณะวิศวกรรมศาสตร์ จุฬา เปิดห้องแล็บ โชว์หุ่นยนต์ต้นแบบ Wheelchair Exoskeleton สำหรับผู้สูงอายุและผู้มีปัญหาด้านการเคลื่อนไหว ให้สามารถขยับลุกจากการนั่งวีลแชร์ มายืนและเดินได้ในหุ่นยนต์ตัวเดียว
รองศาสตราจารย์ ดร.รณพีร์ ชัยเชาวรัตน์ อาจารย์จากสำนักบริหารหลักสูตรวิศวกรรมนานาชาติ คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย กล่าวถึงแนวคิดในการสร้าง “ห้องปฏิบัติการหุ่นยนต์” ว่า “นี่เป็น Alternative Solution ของการศึกษา ผมสร้างห้องแล็บและสิ่งแวดล้อมที่มีเครื่องมือให้นิสิตได้ประกอบหุ่นยนต์ในเวลาว่างจากการเรียน เราเน้น “Proof of Concept” คือนิสิตต้องนำเสนอแนวคิดที่อยากทำในที่ประชุม แล้วค่อยทดลองทำ ก่อนที่จะนำนวัตกรรมไปทดสอบกับผู้ใช้งานจริง”
“ผมอยากประดิษฐ์วีลแชร์ที่เดินได้ วีลแชร์ปกติเคลื่อนที่ได้ตามทางปกติเท่านั้น แต่ขึ้นรถเมล์ไม่ได้ ขึ้นลงบันไดไม่ได้ ผมเลยมองว่าถ้าวีลแชร์สามารถพับขึ้นมาแล้วช่วยให้ผู้นั่ง ลุกขึ้นมาเดินได้ ก็จะทำให้ผู้ที่มีปัญหาทางการเคลื่อนไหวเดินได้สะดวกขึ้น” รศ.ดร.รณพีร์กล่าวถึงแรงบันดาลใจในการประดิษฐ์นวัตกรรม ซึ่งถือได้ว่าเป็นหุ่นยนต์ Wheelchair Exoskeleton ตัวแรกของโลกที่สร้างโดยฝีมือคนไทย
หุ่นยนต์ตัวนี้ได้รับการสนับสนุนทุนวิจัยจากสำนักการวิจัยแห่งชาติในปี พ.ศ. 2564 – 2565 และล่าสุด ได้ผ่านเข้ารอบสุดท้ายในโครงการรางวัลนักเทคโนโลยีรุ่นใหม่ ประจำปี 2567 จัดโดยมูลนิธิส่งเสริมวิทยาศาสตร์และเทคโนโลยีในพระบรมราชูปถัมภ์
หุ่นยนต์ Wheelchair Exoskeleton คืออะไร?
รศ.ดร.รณพีร์กล่าวว่า Wheelchair Exoskeleton เป็นหุ่นยนต์สวมใส่บนร่างกายเพื่อช่วยการเคลื่อนไหวของมนุษย์ มีลักษณะเป็นได้ทั้งวีลแชร์และแปลงเป็นหุ่นยนต์
“ชื่อ Exoskeleton มาจาก 2 คำ คือ Exo แปลว่าข้างนอก และ Skeleton แปลว่าโครงกระดูก เมื่อรวม 2 คำนี้ด้วยกัน แปลได้ตรงตัวว่า “โครงกระดูกภายนอก” จะว่าไปแล้วไอเดียก็คล้ายกับไอรอนแมน ที่เมื่อสวมใส่แล้วจะช่วยให้ผู้สวมใส่มีพละกำลังมากกว่าเดิม ในทางเทคนิคคือการใช้เครื่องจักรกลประกอบหุ่นยนต์ให้ผู้สวมใส่สามารถออกแรงได้มากขึ้น”
จาก concept design ดังกล่าว รศ.ดร.รณพีร์ออกแบบชิ้นส่วนทุกชิ้นของหุ่นยนต์อย่างละเอียด โดยใช้โปรแกรมสามมิติจากคอมพิวเตอร์ และหาซื้อวัสดุเอง ซึ่งอาจารย์รณพีร์เลือกใช้คาร์บอนไฟเบอร์ ที่มีน้ำหนักเบาและผลิตโดยเครื่องพิมพ์สามมิติ บางชิ้นส่วนตัดโดยเครื่องกลึง CNC (Computer Numerical Control)
เมื่อผลิตชิ้นส่วนต่าง ๆ ของหุ่นยนต์ครบแล้ว ก็นำมาประกอบเป็นตัวหุ่น ต่อไปก็เป็นเรื่องของการควบคุมการเคลื่อนไหว ซึ่งแบ่งเป็น 2 ส่วน ส่วนแรก คือ ล้อ ซึ่งได้กลุ่มนิสิตมาเขียนโปรแกรมล้อหน้าให้สามารถวิ่งตรงและเลี้ยวโค้งได้ ส่วนที่สองเป็นมอเตอร์ควบคุมข้อต่อสะโพกกับหัวเข่า ที่อาจารย์รณพีร์เขียนโปรแกมควบคุมเอง
“หุ่นยนต์มีลักษณะเป็นหุ่นยนต์ไฮบริดแบบใหม่ ผสมผสานรถเข็นและ Exoskeleton เข้าด้วยกัน ขาช่วงล่าง สามารถเปลี่ยนโหมดการใช้งานได้ระหว่างนั่งและเดิน โดยใช้มอเตอร์ช่วยในการเคลื่อนไหวของข้อต่อสะโพกและหัวเข่า ส่วนข้อต่อข้อเท้าเป็นข้อต่ออิสระ ไม่มีการขับเคลื่อน ล้อซ้ายและขวาสามารถเก็บเข้าไปในส่วนขาส่วนล่าง เพื่อเปลี่ยนเป็นท่าเดินหรือข้ามสิ่งกีดขวาง” รศ.ดร.รณพีร์อธิบายการเคลื่อนไหวของหุ่นยนต์
ผสานกลไกเข้ากับกายวิภาคมนุษย์
กว่าจะเป็นหุ่นยนต์ต้นแบบ Wheelchair Exoskeleton รศ.ดร.รณพีร์ผสานความรู้ทั้งด้านวิศวกรรมศาสตร์การประดิษฐ์หุ่นยนต์และสรีรศาสตร์ของมนุษย์เข้าด้วยกัน
“การออกแบบหุ่นยนต์ประเภท Exoskeleton ต้องคำนึงถึงอวัยวะของผู้สวมใส่และหุ่นให้ไปด้วยกันได้ สวมแล้วไม่ยืดหรือไม่หด ไม่ระคายผิวหนัง ทุกครั้งที่เหวี่ยงขาจริง Exoskeleton ก็ต้องเหวี่ยงไปด้วย เวลางอหัวเข่า หัวเข่าของหุ่นยนต์ก็ต้องงอไปพร้อมกัน” รศ.ดร.รณพีร์อธิบายข้อท้าทาย
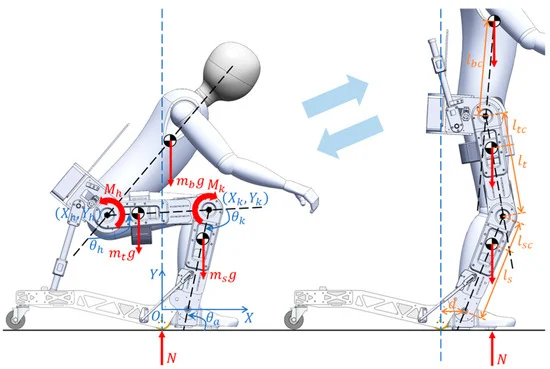
“เราใช้หลักการ Kinematics Compatibility หรือความเข้ากันได้เชิงจลศาสตร์ในการออกแบบหุ่นสวมใส่บนร่างกาย กระดูกคนเป็นกระดูกถ้วยกับกระดูกก้อนที่มาสไลด์กัน แต่กลไกมอเตอร์ หมุนรอบแกนหมุนแกนเดียว เมื่อเอามอเตอร์มาติด จะไม่สอดคล้องกับสรีระคนโดยตรง เราจึงออกแบบข้อต่อหัวเข่าให้เป็น Linkage เพื่อให้เส้นทางการเคลื่อนที่ของจุดศูนย์กลางการหมุน สามารถเลียนแบบกระดูกจริง ข้อต่อที่มีการงอขาเยอะ ๆ ก็ใช้ Four-bar Linkage เพื่อให้จุดหมุนเปลี่ยนไปตามข้อต่อได้”
นอกจากนี้ รศ.ดร.รณพีร์ ใช้ความรู้เรื่อง Biomechanic หรือชีวกลศาสตร์ ซึ่งสามารถคำนวณแรงบิดที่เกิดขึ้นจากรอบข้อเท้า หัวเข่า และสะโพกได้ เพื่อนำข้อมูลไปสร้างหุ่นยนต์ที่เหมาะสมกับสรีระของคน
ในแง่ความสวยงาม คงต้องการความรู้ฝั่งสถาปัตยกรรมศาสตร์มาช่วยออกแบบหุ่นยนต์ และเมื่อจะนำหุ่นยนต์ไปใช้งานจริง ฝ่ายสหเวชศาสตร์คงต้องเข้ามาช่วยแนะนำผู้สูงอายุและผู้ป่วยต่อไป
ขณะนี้ รศ.ดร.รณพีร์ กำลังพัฒนาหุ่นยนต์ Wheelchair Exoskeleton ต้นแบบตัวที่สอง โดยแก้ไขเรื่องการนั่ง การลุกให้มั่นคงและเดินได้สะดวกกว่าเดิม และกำลังอยู่ระหว่างการยื่นขอจดทรัพย์สินทางปัญญา ขั้นตอนต่อจากนี้จะเป็นการทดสอบการใช้งานจริงกับผู้ป่วยและผู้สูงอายุ
อ่านบทความฉบับเต็มได้ที่ https://www.chula.ac.th/highlight/210855/
“จุฬาลงกรณ์มหาวิทยาลัยเป็นมหาวิทยาลัยที่สร้างนวัตกรรมเพื่อสังคม และได้รับการจัดอันดับว่าเป็นมหาวิทยาลัยมีชื่อเสียงติด 100 อันดับแรกของโลกด้านชื่อเสียงทางวิชาการ โดย (QS) World University Rankings 2021-2022″